2.1 Architecture réseau
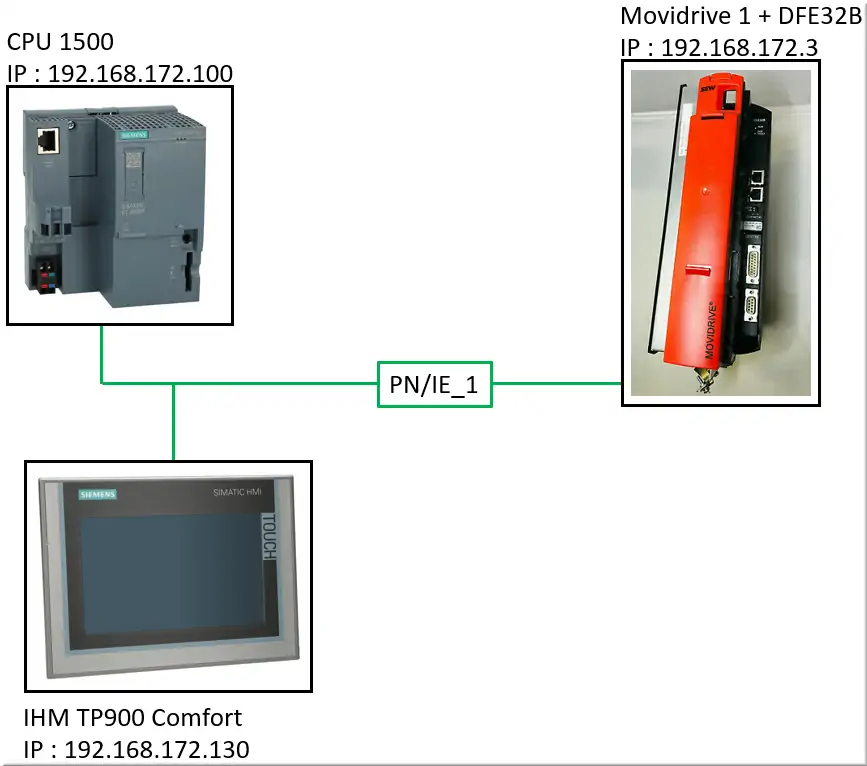
Figure 3 : Architecture réseau
2.2 Création du projet
- Ouvrir TIA portal
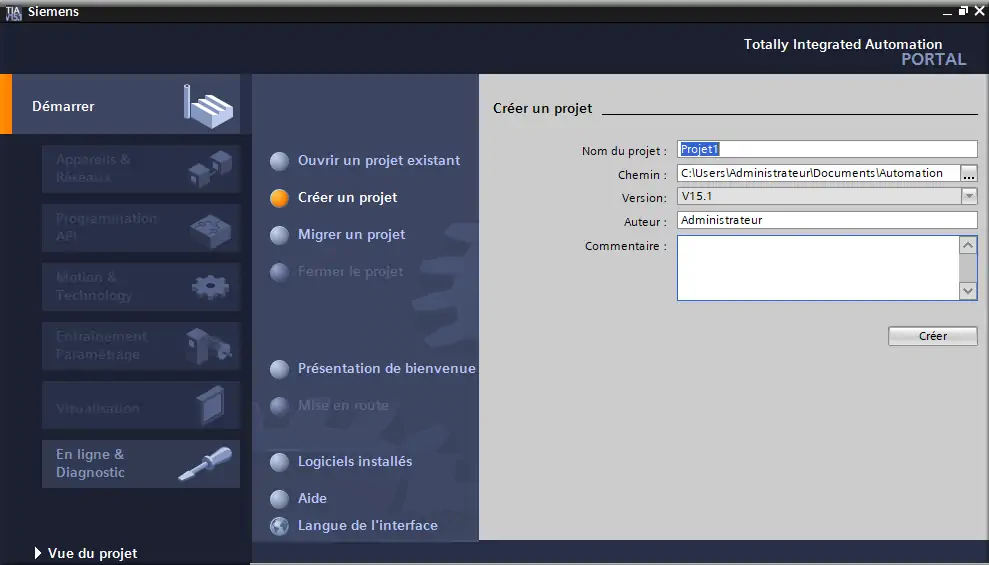
Figure 4 : Tia Portal Créer Projet1
- Créer un nouveau projet « SEW_Positionnement_Tuto »
- Selon l’automate que vous avez pour vos essais, choisir l’automate : dans cet exemple CPU1500 (6ES7 512-1DK01-0AB0)
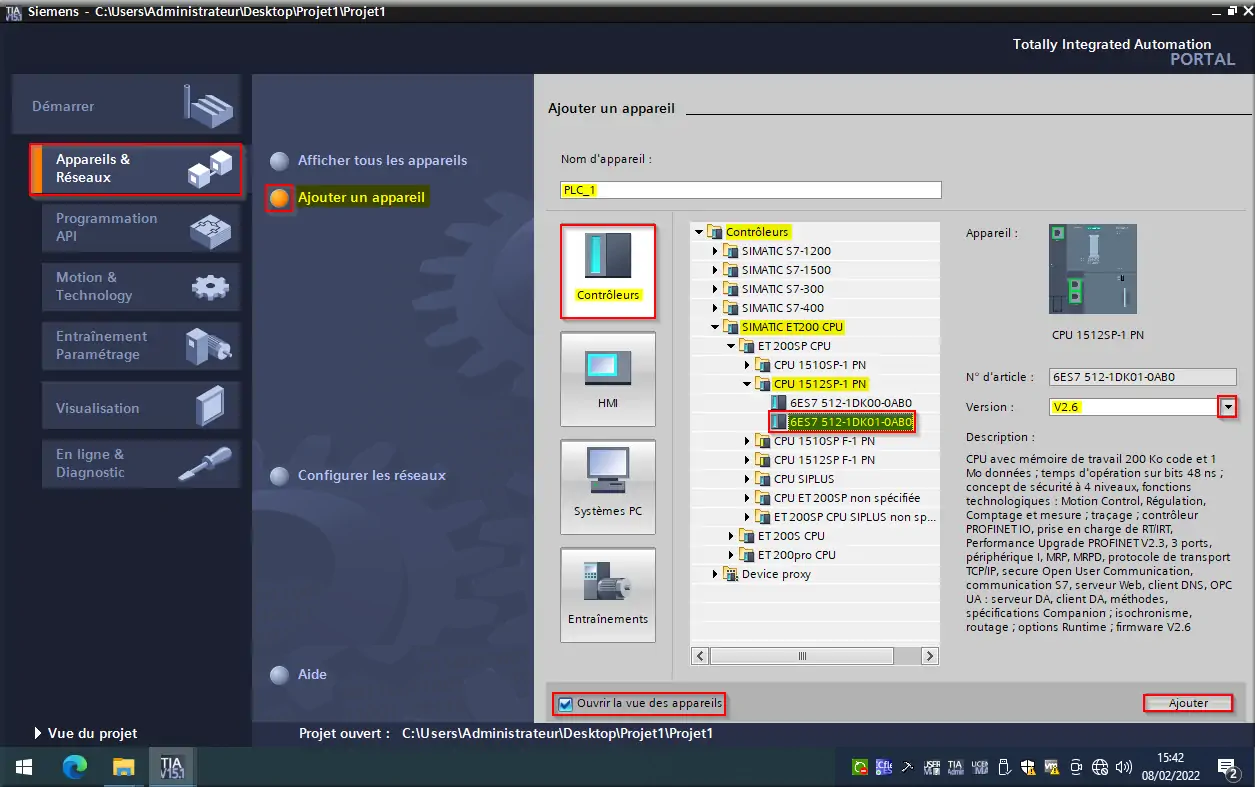
Figure 5 : Choix de l’API CPU1500
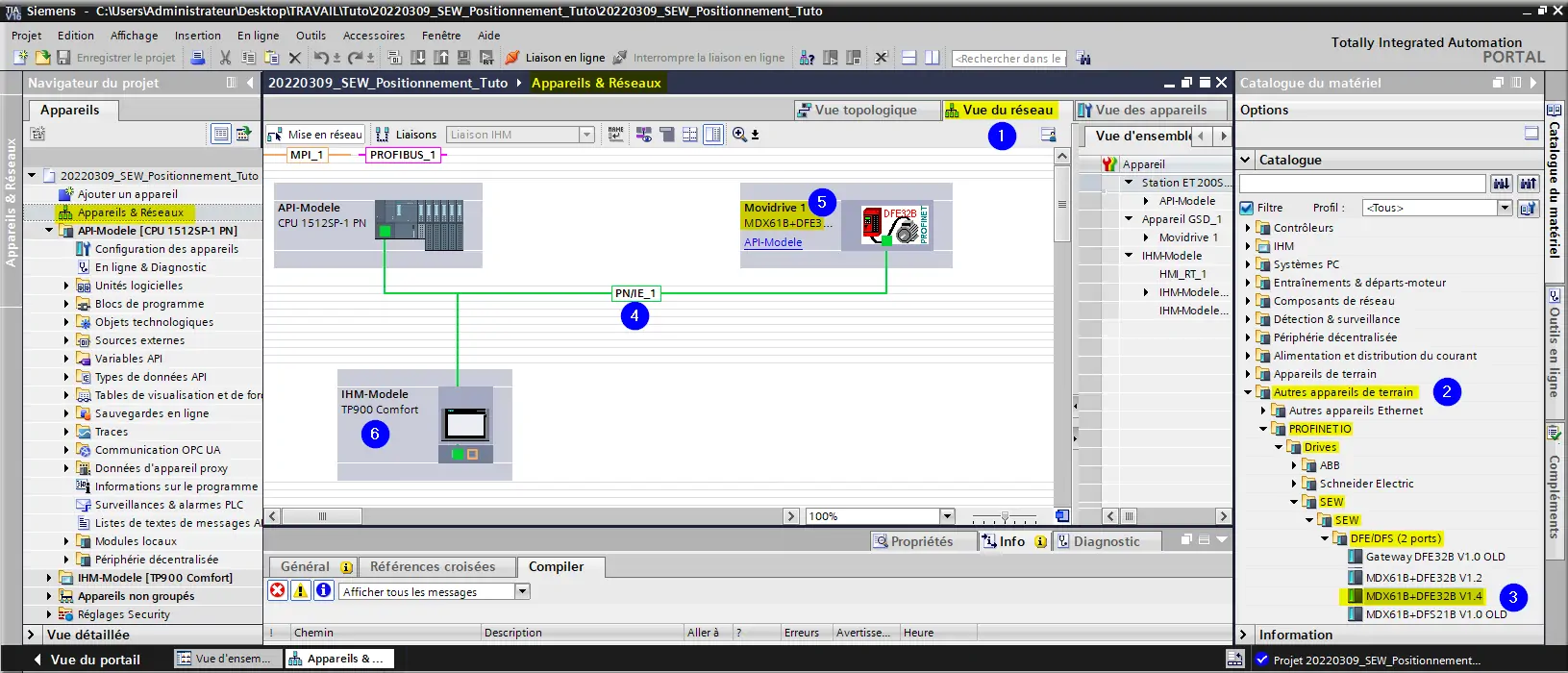
Figure 6 : SEW MDX61B + DFE32B V1.4
- Passer sur la « Vue du réseau »
- Dans « Catalogue » à droite développer « Autres appareils de terrain » > PROFINET IO > Drives > SEW > SEW > DFE/DFS (2 ports)
- Sélectionner MDX61B + DFE32B V1.4
- Relier l’automate au Movidrive
- Changer le nom du Movidrive afin qu’il soit le même que sur le plan électrique, par exemple « Movidrive 1 »
- On ajoute également un IHM. Dans notre exemple on prendra un TP900 Comfort.
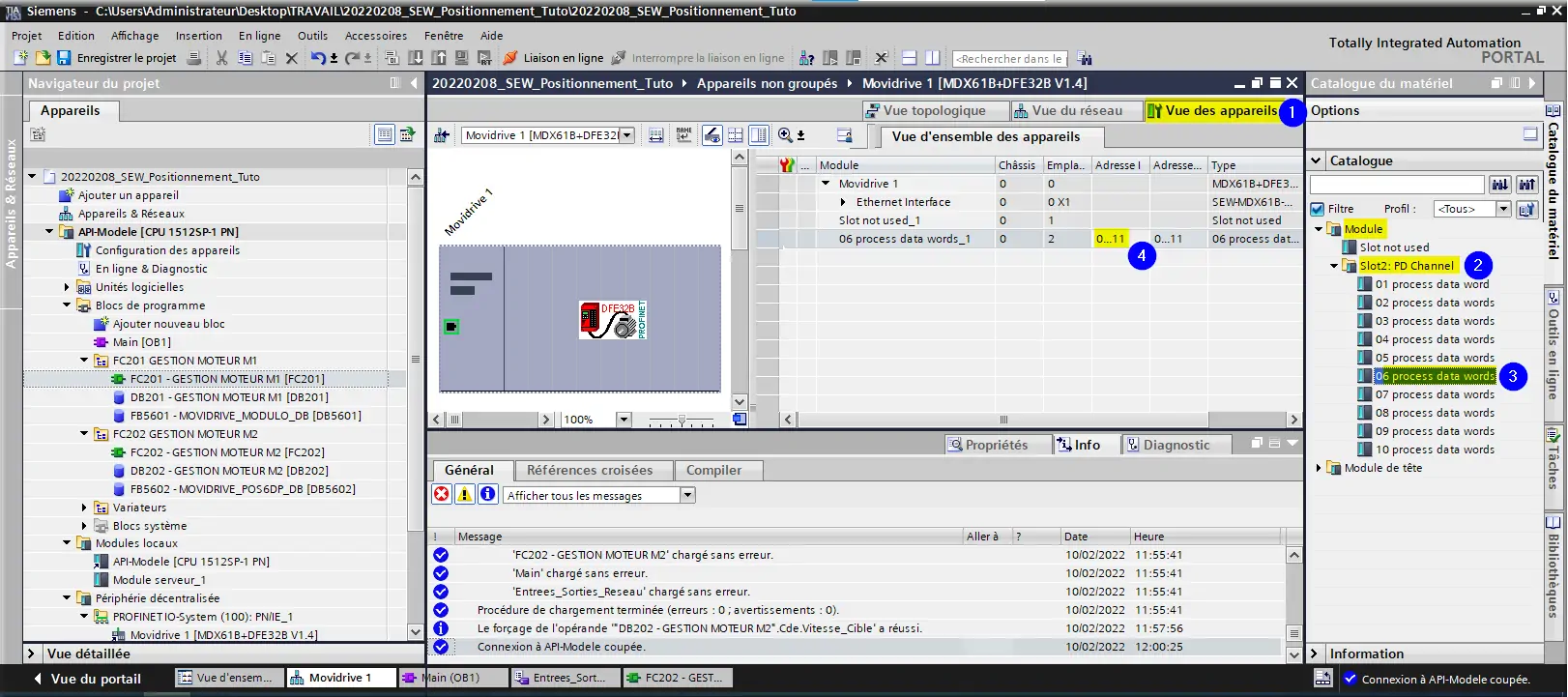
Figure 7 : MovieDrive Pos6DP
- Dans Vue des appareils
- Dans Catalogue > Module > Slot2 : PD Channel > 06 process data words
- ajouter le module « 06 process data words ».
- Choisir les plages adresses entrées / sorties, ici 0..11
Se connecter à la CPU.
Clic droit sur le Movidrive. Sélectionner « Affecter un nom d’appareil »
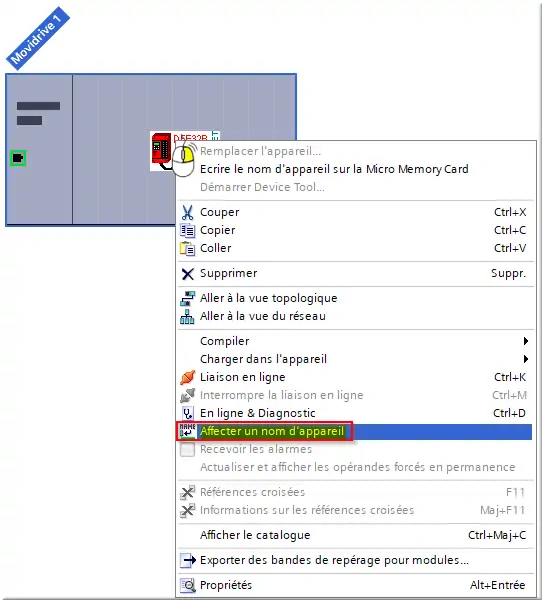
Figure 8 : Menu Affecter un nom d’appareil
La fenêtre suivante s’ouvre :
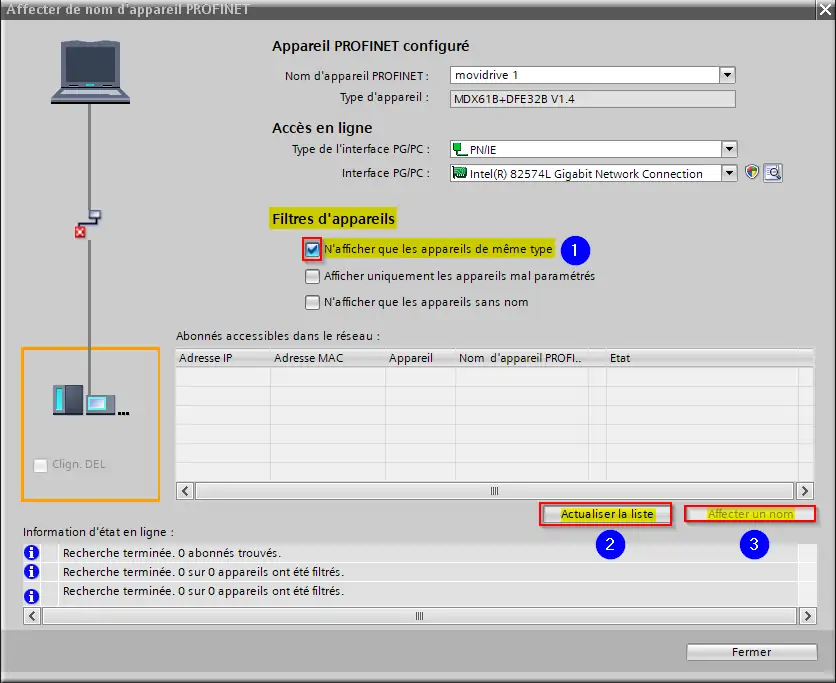
Figure 9 : Nommer l’appareil
- Dans la partie « Filtres d’appareils », cocher la case ☑ « N’afficher que les appareils de même type. »
- Cliquer ensuite sur « Actualiser la liste »
- Sélectionner l’appareil et cliquer sur « Affecter un nom »
Dans « Blocs de programme » :
Ajouter un nouveau groupe « Variateurs » et insérer dans ce groupe les blocs FB d’un MoviDrive Modulo « FB5601_MOVIDRIVE_MODULO » et d’un Movidrive Pos6DP « FB5602_MOVIDRIVE_ POS6DP »

Figure 10 : Variateur FB5602 MovieDrive Pos6DP
Dans « Types de données API », ajouter les deux UDT utilisées pour la programmation des séquences :
Figure 11 : UDT SEQ 4C2i1E

Figure 12 : UDT pas à pas
UDT avec 4 mots de commandes, 2 entiers et 1 état
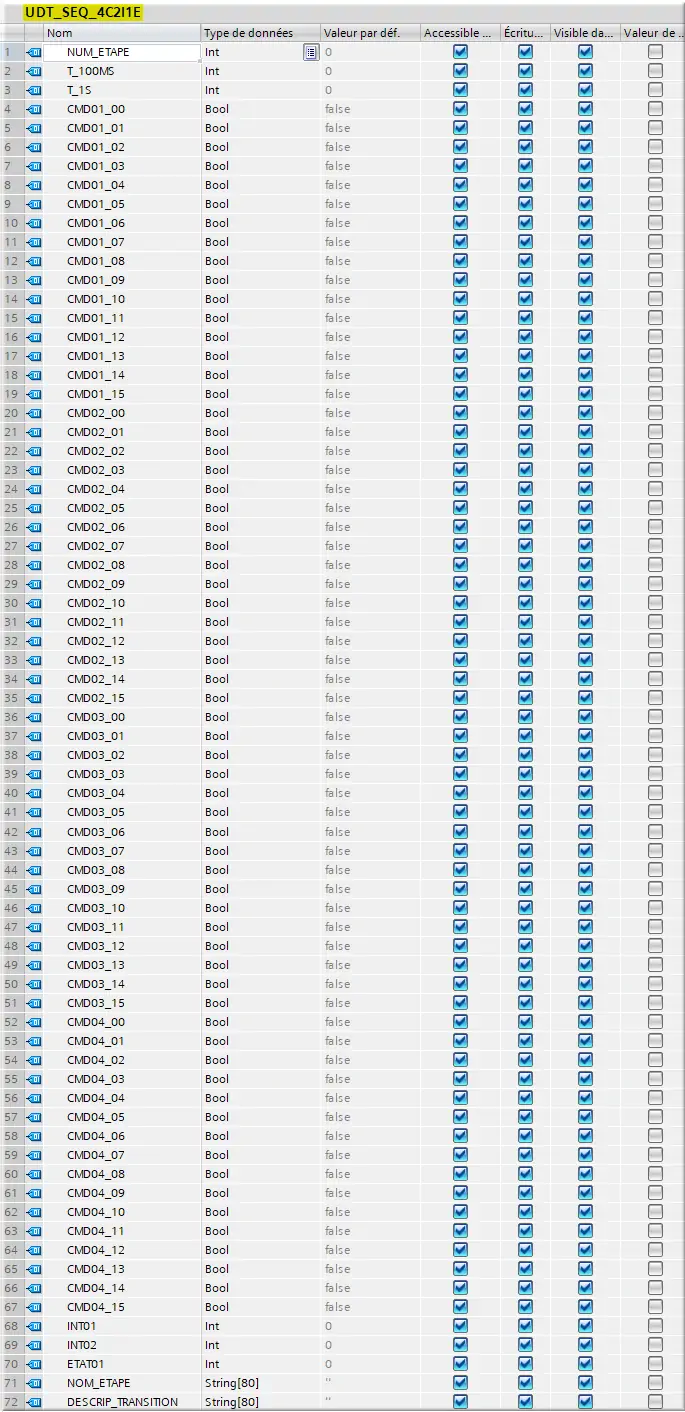
Figure 13 : UDT SEQ 4CI1E
Explications utiles pour la suite :
Fenêtre :
On définit une fenêtre dans laquelle la position sera marquée comme atteinte par rapport à la position cible.
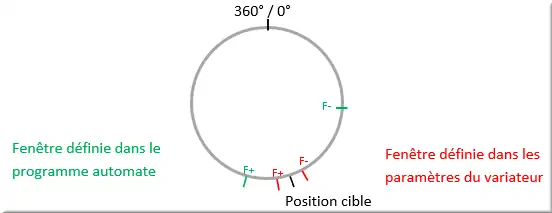
Figure 14 : fenêtre position atteinte vs. cible
Dans les paramètres du variateur les deux points F- et F+ de la fenêtre sont forcément à la même distance de chaque côté de la position cible. Le bit état « Position Atteinte » passe à 1 dès que F- est atteint et repasse à 0 quand F+ dépassé.
On ajoute un réglage de fenêtre dans le programme automate qui nous permet d’avoir une fenêtre ajustable et de régler différemment les points F- et F+ par rapport à la position cible.
Ainsi, la position est atteinte quand la position actuelle se situe entre les points F- et F+.
Dans les deux cas, la fenêtre permet d’anticiper l’action suivante et l’axe se positionne toujours à la position cible.
Rampe :
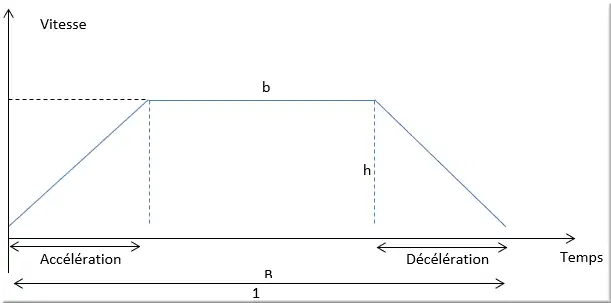
Figure 15 : Rampe d’accélération
La rampe d’accélération est la durée que va mettre le moteur à atteindre sa vitesse cible.
La rampe de décélération est la durée que va mettre le moteur à atteindre une vitesse nulle.
La distance parcourue est égale à l’aire du trapèze :

Figure 16 : aire du trapèze
Dans cet exemple, la distance parcourue est de 360° en 1s.
L’accélération et la décélération durent chacune 400ms.
On a donc B = 1s et b = 600ms.
Pour trouver la valeur de la vitesse cible h on utilise la formule de l’aire du trapèze
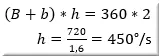
Figure 17 : vitesse cible
La vitesse cible est donc de 450° par seconde.